Como Funciona?
O Air Dragon é um Drone de uso doméstico, não sendo usado para uso profissional (como filmagens, por exemplo), por isso ele é pequeno e extremamente leve.
Suas placas são feitas de fibra de vidro e seus braços são de plástico . A fibra dá resistência e leveza, enquanto o plástico é usado em pontos da estrutura que não são cruciais para a resistência do aparelho. Os parafusos, a bateria e os motores são feitos de metal.
No Air Dagon foram utilizados quatro motores localizados nas extremidades de quatro eixos, cada um com sua respectiva hélice, dando sustentação ao voo.
Utilizou-se também o Arduíno para programar e sincronizar os motores e também quatro acelerômetros, que são capazes de medir a aceleração de cada motor.
Materiais Utilizados
Motor
Os motores utilizados no Air Dragon foram os Brushless, que são motores de corrente contínua sem escovas. Por não possuírem escovas, eles oferecem algumas vantagens como confiabilidade mais elevada, redução de ruído, vida útil mais longa (devido a ausência de desgaste da escova), a eliminação da ionização do computador, e a redução total da interferência magnética.
O modelo utilizado foi o A2212.
O KV é uma medida que nos diz quantas Revoluções Por Minuto (RPM), onde o motor irá girar para cada volt aplicado se não houver nenhuma carga, ou seja, por exemplo, se o motor tem 1000KV para cada 1V na bateria, ele girará 1000RPM.

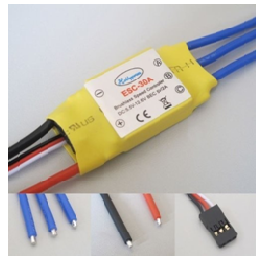
esc
O ESC (controlador eletrônico de velocidade) é simplesmente um circuito eletrônico, e como o próprio nome diz, é ele o principal responsável pelo controle de velocidade do motor. Mas ele não serve só pra isso, ele também distribui a alimentação para os diversos componentes que compõe o aeromodelo. Tudo acontece da seguinte forma:
O transmissor (rádio controle) envia um comando, esse comando é recebido pelo Receptor que por sua vez o envia para o ESC, e dependendo do conteúdo dessa informação (comando), o ESC manda mais ou menos energia para o motor.
Normalmente o ESC divide a energia entre o motor e o receptor. Para o receptor, oSpeed envia 4,8 Volts e para o motor envia ou 7,4 Volts ou 11, Volts.
Hélices
Para cada tamanho e potência de motor existe um tipo de hélice. Geralmente vem no manual ou no próprio motor a indicação de qual o tamanho da hélice mais adequada. O objetivo é escolher uma configuração que garanta eficiência energética de forma a maximizar o tempo de voo.
As hélices podem ser horárias ou anti-horárias. Como no caso de um dronemulti-motor, metade das hélices rodam no sentido horário e a outra metade no setido anti-horário. Essa divisão faz com que o torque dos motores fiquem balanceados, permitindo que o drone fique estabilizado.
As hélices são muito frágeism, por isso é sempre bom ter hélices reservas.

bateria
A bateria utilizada foi a bateria de células iões de lítio polímero, com resistência interna pequena. O modelo utilizado foi o DC 12680.
DC (input): 12.6V
DC (output): DC12V 6500mAh; DC9V 8500mAh; DC5V 15000mAh Output current (3A).

Arduíno uno
O Arduíno é a peça indispensável para o funcionamento do Drone. É ele que permite o funcionamento sincronizado dos Esc's e, consequentemente, dos motores. A programação do Arduíno é muito importante para que o drone voe sem maoires problemas.

Acelerômetro
Um acelerômetro nada mais é que um instrumento capaz de medir a aceleração sobre objetos. Ao invés de posicionar diversos dinamômetros (instrumento para medir a força) em lugares diferentes do objeto, um único acelerômetro é capaz de calcular qualquer força exercida dobre ele. É o acelerômetro que faz com que o Drone fique estabilizado no ar.

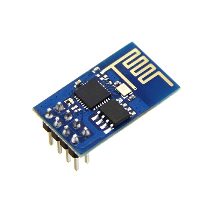
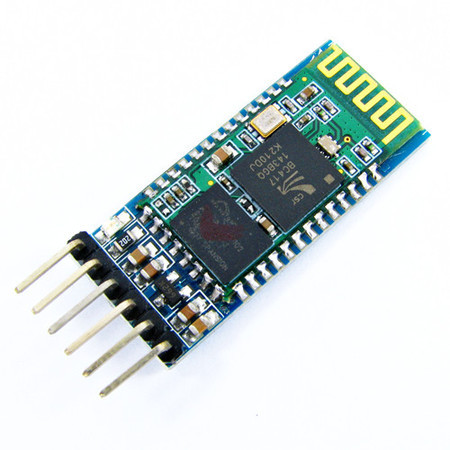
modulo wi-fi/bluetooth
Pode-se utilizar o módulo bluetooth para conectar-se ao arduíno, ou se quiser uma distancia maior entre o aparelho e o Drone, utiliza-se o módulo wi-fi. No nosso projeto foram utilizados ambos os módulos.